Robotics
Autonomous Car Navigation System
Year
2023
Technologies
LIDAR, ROS, Raspberry Pi, Computer Vision
Role
Lead Developer
Built a 1/10th scale autonomous vehicle to overcome challenges in researching full-sized autonomous vehicles, focusing on dynamic object avoidance and LIDAR-based navigation. This project served as a testbed for developing and refining algorithms for autonomous navigation in complex environments.
The autonomous car navigation system integrates hardware components with sophisticated software algorithms to enable the vehicle to perceive its environment, make decisions, and navigate safely without human intervention. The system demonstrates advanced capabilities in mapping, localization, path planning, and obstacle avoidance.
Utilized a Traxxas Rally car as the base platform, implementing a brushless DC motor for propulsion and a servo motor for steering control. The vehicle was modified to accommodate the additional sensors and computing hardware required for autonomous operation.
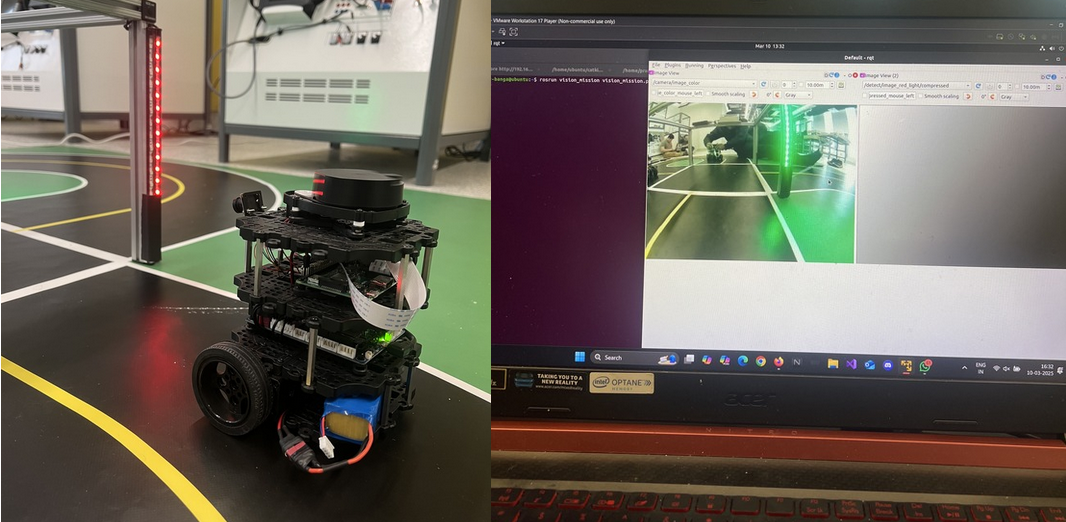
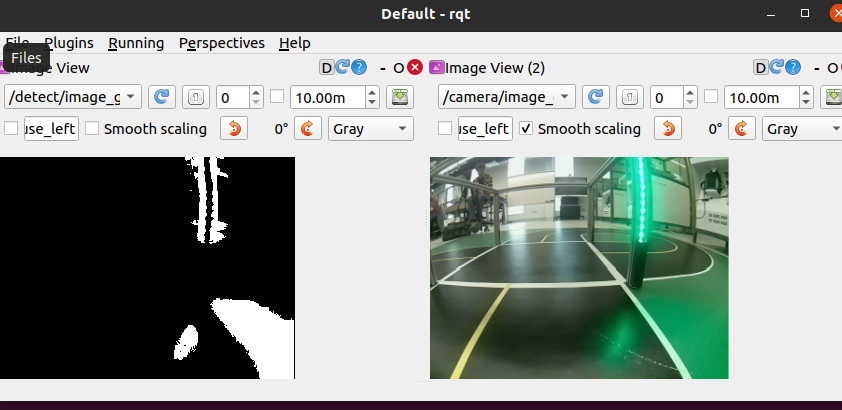
Implemented LIDAR for environmental perception, providing 360-degree awareness of obstacles and terrain features. The LIDAR data is processed to create a point cloud representation of the surrounding environment, enabling accurate distance measurements and object detection.
Employed ROS (Robot Operating System) on Raspberry Pi 3 for communication and control. The modular software architecture includes nodes for sensor data processing, localization, mapping, path planning, and motor control, all communicating through ROS topics and services.
Implemented Hector SLAM for mapping and Pure Pursuit for autonomous navigation. The system builds a map of the environment in real-time while simultaneously localizing the vehicle within that map. The Pure Pursuit algorithm calculates steering commands to follow a predetermined path while avoiding obstacles.

Conducted extensive research on autonomous vehicle technologies, sensor options, and navigation algorithms. Defined project requirements and created a detailed implementation plan.
Modified the Traxxas Rally car to accommodate the LIDAR sensor, Raspberry Pi, and additional electronics. Designed and fabricated custom mounting brackets and enclosures.
Integrated the LIDAR sensor and calibrated it for accurate distance measurements. Developed ROS nodes to process and publish sensor data.
Implemented Hector SLAM for simultaneous localization and mapping. Tuned parameters for optimal performance in indoor environments.
Developed and implemented the Pure Pursuit algorithm for path following. Created a path planning system to generate optimal routes based on the current map.
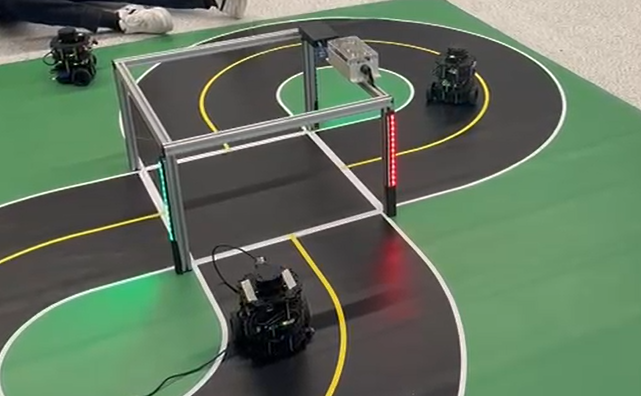
Conducted extensive testing in various environments, collecting performance data and refining algorithms. Implemented improvements based on test results.
The autonomous car navigation system successfully demonstrated reliable navigation in complex environments, with the ability to avoid obstacles and follow predetermined paths. The system achieved a navigation accuracy of approximately 95% in controlled environments.
This project provided valuable insights into the challenges of autonomous vehicle development and served as a platform for testing and refining navigation algorithms. The modular architecture allows for easy integration of additional sensors and capabilities in future iterations.

Challenge: Configuring the Electronic Speed Controller (ESC) to work with ROS control signals.
Solution: Developed a custom ROS node to translate high-level velocity commands into appropriate PWM signals for the ESC, with safety limits and failsafe mechanisms.
Challenge: Integrating all components within the ROS framework with limited computational resources.
Solution: Optimized node communication and processing to reduce computational load, prioritizing critical navigation functions.
Challenge: Generating accurate odometry data for localization without wheel encoders.
Solution: Implemented a sensor fusion approach combining LIDAR scan matching and IMU data to estimate vehicle position and orientation.
Challenge: Adapting the Pure Pursuit algorithm for the specific dynamics of the vehicle.
Solution: Tuned lookahead distance and control parameters based on extensive testing, implementing adaptive parameters based on vehicle speed.