Automation
Solar Tracker
Year
2024
Technologies
Arduino, Servo Motors, LDR Sensors, 3D Printing
Role
Lead Developer
Developed a solar tracker using Arduino, servo motors, and LDR sensors for dynamic solar panel optimization. This project aimed to create an affordable, user-friendly solution for individuals and small organizations to enhance solar panel efficiency and promote sustainability education.
The solar tracker automatically adjusts the position of a solar panel to follow the sun's movement throughout the day, maximizing energy capture and efficiency. By implementing a dual-axis tracking system, the device can optimize solar panel positioning in both horizontal and vertical planes.
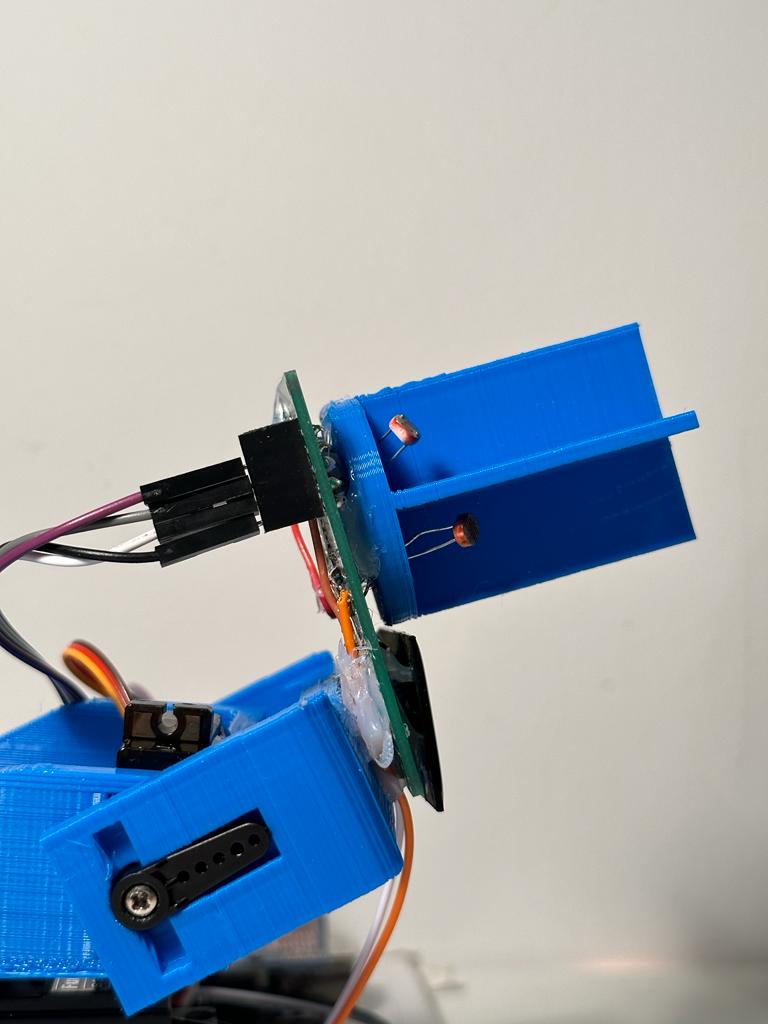
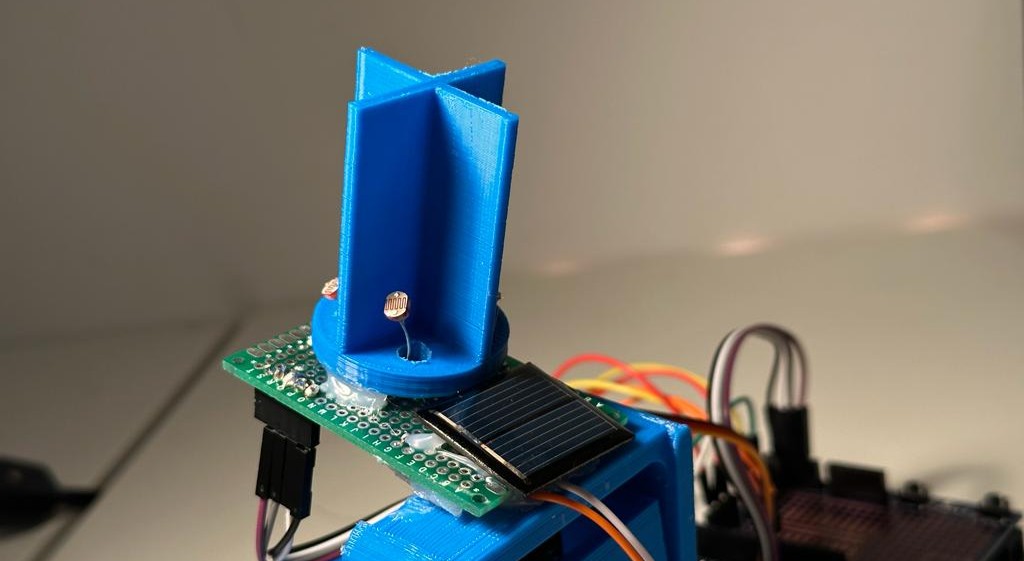
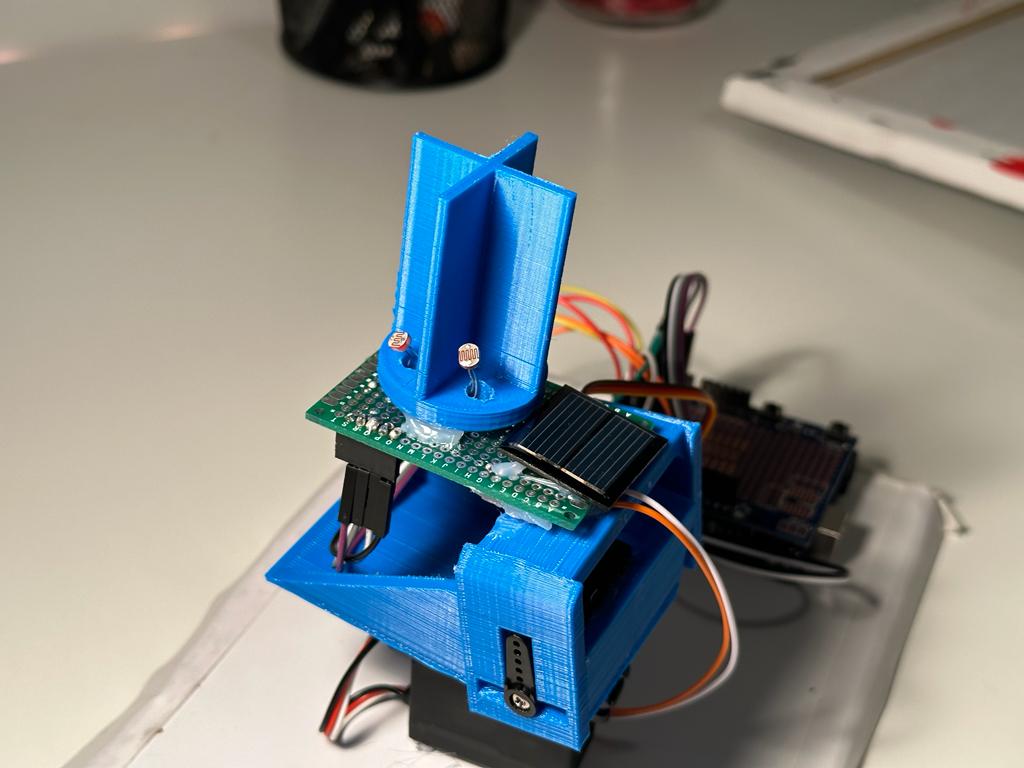
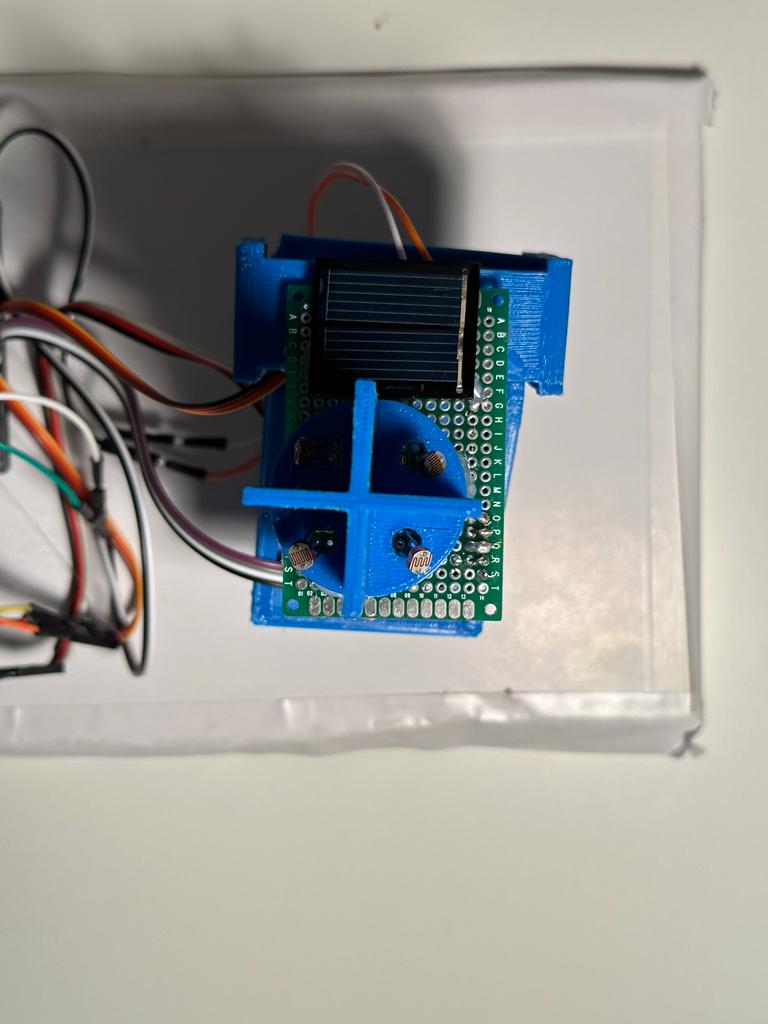
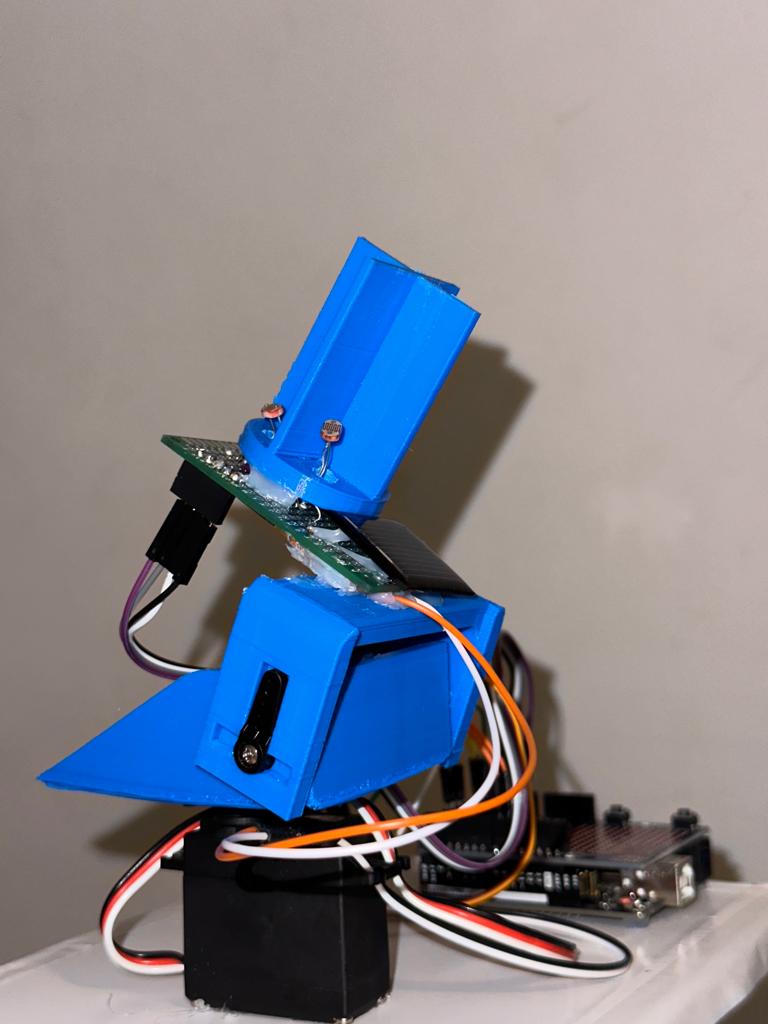
Implemented a dual-axis solar tracker with Arduino Uno, S3003 FUTABA, and MG90S servo motors. The system uses Light Dependent Resistor (LDR) sensors to detect light intensity from different directions, allowing the controller to determine the optimal position for the solar panel.
Programmed Arduino to respond to LDR sensor feedback, ensuring precise solar panel alignment. The algorithm compares readings from multiple LDR sensors and calculates the optimal angle for both horizontal and vertical adjustments, continuously updating the position as the sun moves.
Utilized 3D printing for a compact Pan-Tilt system using Solid Works, facilitating two-dimensional movement for efficient tilt and pan adjustments. The design ensures smooth movement while maintaining structural integrity to support the weight of the solar panel.
Applied equations and block diagrams to model servo motor torque and solar panel motion in MATLAB Simulink, ensuring an efficient and scalable solar tracking solution. This analysis helped optimize the control parameters and predict system behavior under various conditions.

Conducted research on solar tracking systems, servo motor control, and light sensing technologies. Defined project requirements and created a detailed plan for implementation.
Developed initial prototypes to test sensor responsiveness and motor control. Iterated on the design based on performance testing and feedback.
Created detailed 3D models in SolidWorks for the mechanical components. Printed and assembled the parts, making adjustments as needed for optimal fit and function.
Integrated Arduino controller, servo motors, and LDR sensors. Developed and refined the control algorithm for accurate sun tracking.
Conducted extensive testing under various lighting conditions. Optimized the system for energy efficiency and tracking accuracy.
Completed the final assembly and documentation. Demonstrated the system's effectiveness in real-world conditions.
The solar tracker successfully demonstrated improved energy capture efficiency compared to fixed solar panels. Testing showed an increase in energy production of approximately 25-30% under optimal conditions.
The project serves as an educational tool for demonstrating renewable energy concepts and automation principles. Its affordable design makes solar tracking technology accessible to individuals and small organizations interested in optimizing their solar energy systems.

Challenge: Ensuring consistent LDR sensor readings under varying light conditions.
Solution: Implemented adaptive calibration algorithm that normalizes readings based on ambient light levels.
Challenge: Achieving precise positioning with affordable servo motors.
Solution: Developed a PID control system to improve positioning accuracy and reduce oscillation.
Challenge: Minimizing power usage to maximize net energy gain.
Solution: Implemented power-saving modes and optimized movement intervals to reduce unnecessary adjustments.
Challenge: Creating a stable platform that can withstand environmental factors.
Solution: Reinforced 3D printed components and added counterweights to improve stability.


